 智慧园区
智慧园区 展会展厅
展会展厅 工程测绘
工程测绘 公共安全
公共安全 文博旅游
文博旅游 电商零售
电商零售 房产营销
房产营销 720°全景
720°全景 电力能源
电力能源一、站式空间扫描
随着空间智能的快速发展,激光扫描仪的应用场景越来越多,作业方式分为站式扫描(静态扫描)和SLAM扫描(动态扫描)。站式扫描作为一种高效且精度高的三维数据采集方式,广泛应用于VR空间营销,机器人仿真,数字孪生,建筑测绘、工业检测及文化遗产数字化等领域。
站式扫描通过将多站扫描获取的点云数据进行拼接来获得完整场景。过往的站式扫描需要在作业时通过设置标靶来实现两站间的数据自动拼接,或者在数据采集完成后由人工介入进行点位拼接,其操作门槛高、模型制作交付时效低。
众趣旗下的自研SPACCOM X3系列3D激光扫描仪采用站式扫描作业方式,基于众趣自研的自动位姿拼接算法(包括站位间两两配准技术以及全局优化技术)实现了完整场景的自动化重建,大大降低了作业门槛,提升了制作效率。SPACCOM X3在采集过程中显示出卓越的环境适应性,并能够精确捕捉空间内的每一处细节,让大空间和超大空间三维重建变得轻松与高效,为专业人士提供无与伦比的便利体验。

二、通过空间计算实现的站位间的两两自动化对齐
在传统方式中,两两站位间的位姿关系往往依赖手动测量、人工摆点、后期比对调整等方式来建立,不仅耗时耗力,而且误差大。SPACCOM X3的自动位姿拼接技术就是用硬件设备+算法,自己认路、找方向,最终拼接成为一个完整的、绝对还原的空间。SPACCOM X3集成了多种传感器模块,包括:
-
高分辨率彩色相机:负责采集图像,识别空间纹理、语义信息
-
深度传感器:获取空间中的深度信息以及立体结构(比如墙、楼梯等)
-
惯性传感器(IMU):感知设备的方向变化、移动轨迹
这三类数据协同输入,形成了高维度、多模态的拼接输入源,为后续算法提供坚实基础。
传统配准方法,例如ICP(迭代邻近点)算法在连续配准时易产生漂移,导致局部精度下降;其次对于环境特征依赖比较严重,对于纹理缺失场景(如白墙、金属表面)的鲁棒性不足。SPACCOM X3会自动从每个站位的图像、点云中提取纹理、几何等特征,进行相似度匹配来自动建立站位间的位姿关系。
此外针对长走廊、酒店、车库等结构重复、纹理少、光线单一,甚至完全白墙的场景,会因为缺乏特征导致基于视觉匹配的失败率升高、两站间的拼接成功率降低;也容易出现跳点、错位、空间漂移等问题。为解决该问题,SPACCOM X3通过高精度IMU与深度传感器融合,大幅提升空间结构感知与数据质量,即使图像没有明显纹理,也可通过结构变化进行拼接判断。
即使面对暗光场景如KTV、密室逃脱馆等,SPACCOM X3也能够做到准确拼准。通过不断的AI算法训练优化,目前SPACCOM X3的自动位姿拼接成功率超过了96%,在行业内处于头部水平。
三、全局优化实现高精度的数字孪生空间
针对面积大、空旷的场景,采用激光站式扫描可能会设置成百上千个站点,如果只依靠两两站点配准,容易在连续配准中累计误差,导致站位漂移。譬如大型园区、公园、街道等拍摄路径如果成环形,就容易在起点和终点碰头的区域,由于多次出现的相似区域容易造成拼错或错位,位姿误差会在回环路径中不断积累,最后难以闭环,导致后期需要大量人工干预,甚至无法还原真实路径。
SPACCOM X3使用回环检测,通过对整个场景站位的图像、点云做相似性分析,并利用轨迹一致性约束等手段自动识别空间回环节点,同时考虑整个场景的空间结构(结构面、边等)进行约束修正,进行全局层面的精度修正与位姿漂移抑制。针对不具备回环约束的单一走廊、道路,SPACCOM X3充分利用高精度IMU提供的信息能有效抑制累积误差造成的偏移、塌陷问题。这使得SPACCOM X3即使在超大空间、重复结构、弱纹理等复杂环境中,也能保证空间采集的连贯性和准确性。
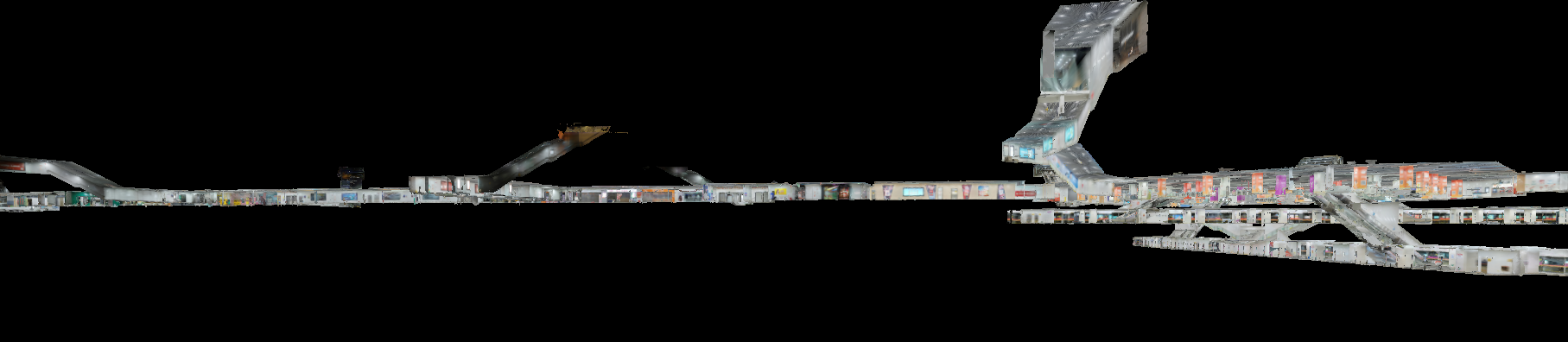
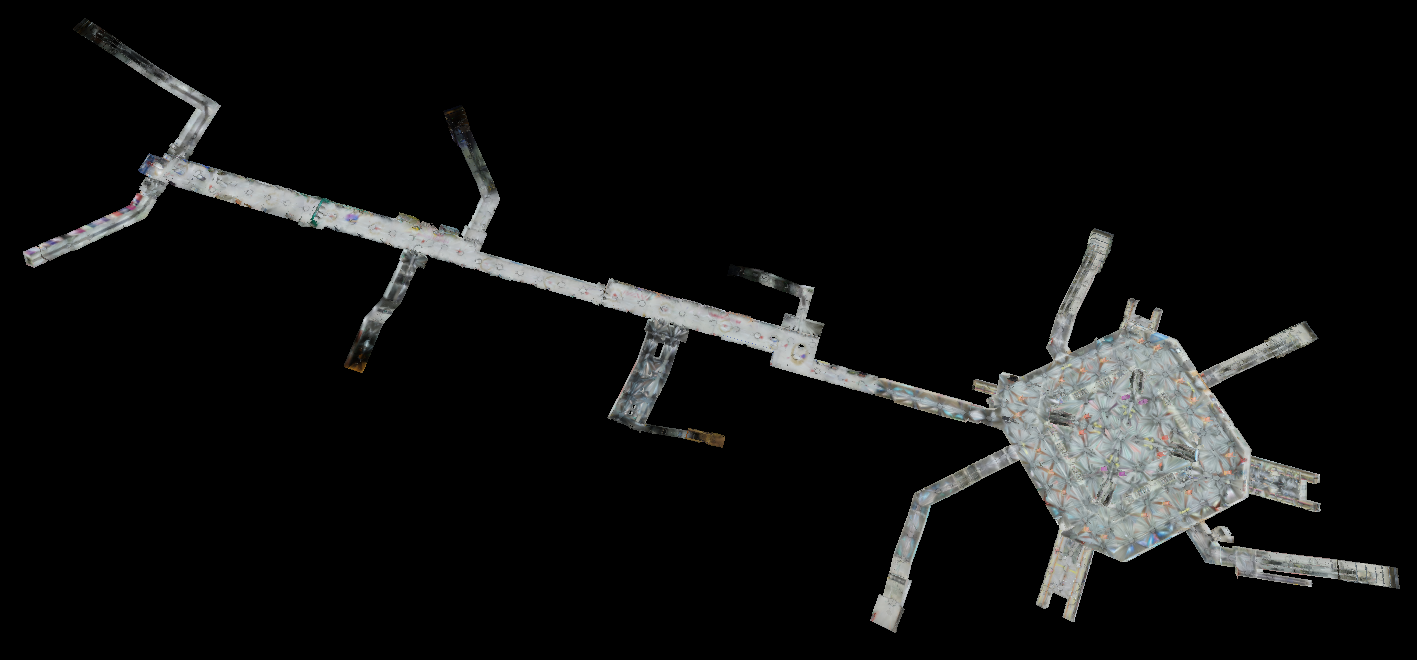
例1. 某地铁站全貌

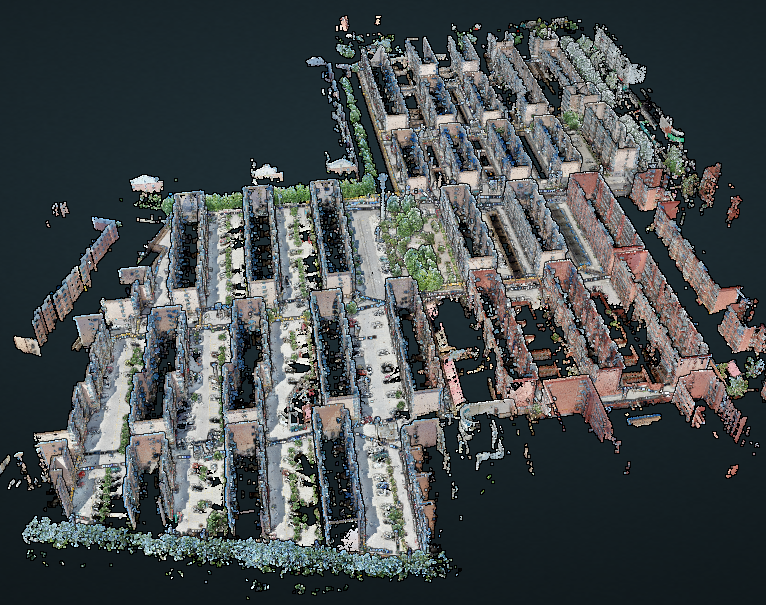
例2. 某小区全貌
结论
站式扫描的位姿拼接技术已从传统手工标定向自动化、智能化方向演进。通过融合多传感器数据与先进算法可显著提升重建效率与精度,推动三维数字化技术的普惠化应用。
提升采集能力、降低操作门槛、改良制作效率、增加更多场景的适配能力,这样才能为用户带来更简单的操作体验,更为整个行业带来智能、高效、普惠的空间采集解决方案。
未来,众趣科技将持续围绕多传感器协同、智能空间计算、全局优化算法三大技术支柱打磨这项核心能力,为每一个渴望还原真实世界的用户,提供值得信赖的数字孪生技术底座。


