一、数字孪生与智慧园区的深度融合
在 AI 空间计算高速发展的当下,智慧园区正从概念构想加速迈向规模化落地实践。作为连接物理世界与虚拟空间的核心技术,数字孪生通过构建与实体园区 1:1 精准映射的虚拟镜像,实现对园区规划、建设、运营全生命周期的精细化管理。其中,3D 空间数据底座作为数字孪生系统的核心基础设施,犹如支撑人体的骨骼系统,承载着园区运营中超 90% 业务场景的数据交互与逻辑运算,成为驱动园区智慧化升级的核心技术底座。
以广州明珠湾灵山岛尖智慧园区为例,其构建的数字孪生底座整合了倾斜摄影模型、建筑信息模型(BIM)、物联网(IoT)传感器数据等多源异构数据,打造出覆盖 2.8 平方公里的高精度三维空间场景。通过对园区地形地貌、建筑群落、地下管网等实体要素进行几何建模与语义标注,实现从宏观规划布局到微观设备管理的立体化管控。借助虚实融合的空间底座,管理者可实时监测园区能耗热力分布、交通流量变化、设备运行状态等关键指标,决策响应速度提升 40% 以上,显著优化园区运营效率。该园区通过智慧指挥中心实现智能视觉识别算法的集成应用,例如儿童走失追溯、渣土车违规识别等,年综合服务管理费用成本节约 40%,印证了空间数据底座的实际价值。
二、3D 空间数据底座的技术架构解析
空间数据底座的构建遵循“全要素数据采集→多维度数据融合→智能化三维建模→动态化更新维护”的技术路线,融合数据科学、计算机图形学、物联网等多学科技术,形成完整的技术实现体系。
1、多源数据采集体系
数据采集作为底座构建的基础环节,需整合五类核心数据资源,构建全方位数据输入体系:
地理信息数据
采用无人机倾斜摄影技术获取分辨率达 5cm 的 DOM(数字正射影像)与 DSM(数字表面模型),通过多视影像匹配算法生成密集点云,并结合 LiDAR 激光雷达点云数据进行地面滤波与地物提取,最终生成包含地形坡度、高程等高线的高精度地形模型,实现地形地貌的毫米级还原。某园区案例中,通过 15 架次无人机作业,完成 10 平方公里范围的数据采集,生成点云密度达 200 点 /㎡ 的地理数据集。
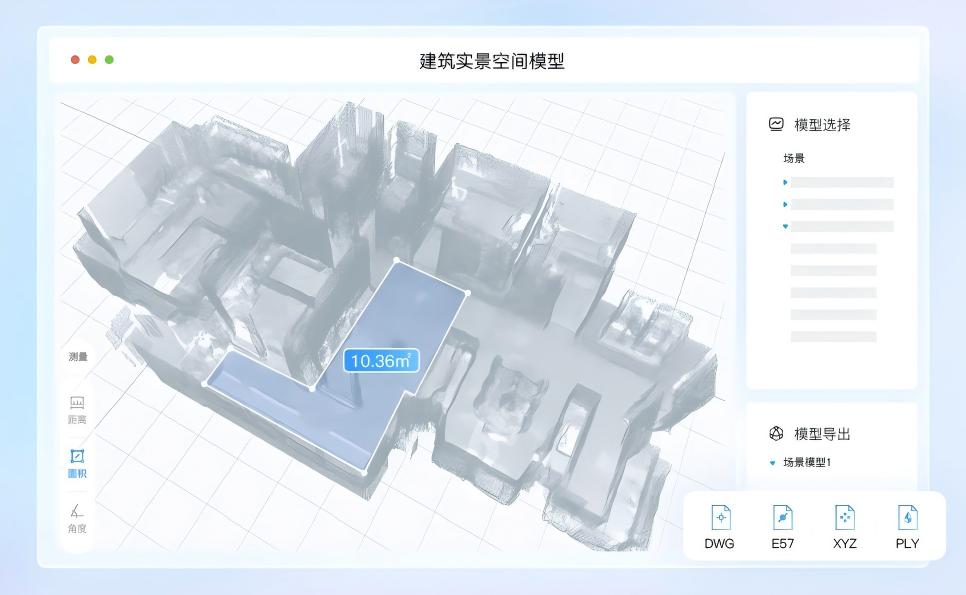
激光扫描空间3D建模
运用众趣科技自研的 SPACCOM X3 Pro 3D 激光扫描仪,集成 16 线激光雷达与 2400 万像素全局快门相机,对建筑进行 360° 环绕扫描,单站扫描精度可达 ±2mm。通过点云降噪(VoxelGrid 体素滤波) 与平面检测(RANSAC 随机抽样一致性算法),自动识别墙体、门窗、管线等建筑构件,生成毫米级精度的实景3D模型。该设备单次扫描覆盖半径 100m,点云密度达 1000 点/㎡,40 分钟可完成 2000㎡ 空间扫描,整体拼接精度控制在 ±3mm,数据完整性达 99.8%,为 BIM 建模提供毫米级原始数据。
物联网感知数据
部署 LoRaWAN 低功耗广域网构建传感器网络,实时采集温湿度、光照、CO₂浓度、设备振动等 20 + 环境参数,通过 MQTT 协议(QoS 2 级可靠传输) 实现数据实时上云。某智慧工厂案例中,5000 + 传感器节点形成的监测网络日均产生 12GB 时序数据流,经边缘计算网关预处理后,关键数据上传延迟控制在 500ms 以内,为园区微气候模拟与设备预测性维护提供实时数据支撑。
业务系统数据
通过 ETL 数据管道对接 OA、ERP、安防等业务系统,采用 Kafka 分布式消息队列实现数据异步抽取,利用 DataX 数据集成工具完成结构化数据清洗(空值填充、异常值检测)。典型场景中,某园区整合 30+ 子系统数据,构建包含 10万+人员档案、5万+资产台账、2万+事件记录 的业务数据库,通过主外键关联实现跨系统数据追溯。
互联网开放数据
接入高德地图交通 API、WeatherAPI 气象数据、百度舆情分析服务,通过网络技术采集园区周边商业配套数据,经自然语言处理(NER 命名实体识别)结构化后,与空间数据底座融合形成"地理空间+社会经济"双维度分析体系。例如某园区通过融合交通拥堵数据与建筑能耗数据,优化通勤班车路线,减少 15% 能源消耗。
2、数据融合与标准化处理
针对多源数据存在的坐标系差异、格式不兼容、语义冲突等问题,通过三层技术架构实现数据融合:
几何校准
采用布尔莎七参数转换模型,将 WGS84、CGCS2000 等坐标系统一转换为园区专用的UTM 投影坐标系(精度 ±5cm)。借助吉奥时空 LOD1.3 建模工具的 SIFT 特征点匹配算法,自动对齐点云数据与倾斜摄影模型的同名特征点,确保多源数据空间位置误差小于 10cm。
格式转换
利用数据适配器,支持 IFC→CityGML、LAS→PLY、JSON→GEOJSON 等 20+ 格式互转。以 BIM 数据为例,通过开源工具 FZKIT 将 IFC 文件解析为轻量化 GlTF 格式,模型文件大小压缩 70%,浏览器加载时间从 20 秒缩短至 3 秒,显著提升数据加载效率。
语义对齐
基于 OWL 本体建模语言构建园区领域本体,定义“建筑-楼层-房间-设备”四级空间层级与“类型-位置-状态-维护”设备属性体系。运用 BERT 预训练模型对传感器数据标签进行语义消歧,构建包含 500+ 实体类型、2000+ 关系边的语义网络,消除不同系统间的数据语义歧义。
3、三维建模技术体系
采用分级建模策略,根据应用场景需求平衡模型精度与运算效率:
LOD 白模构建
基于倾斜摄影模型与激光点云数据,通过 DeepLabv3 + 语义分割算法 自动提取建筑基底轮廓,结合 DSM 高程数据生成带 Z 轴坐标的体块模型。利用 GPU 并行计算技术,实现每小时 8 平方公里的建模速度,模型平面精度达 10cm,高程精度达 15cm,满足园区宏观规划与日照分析需求。
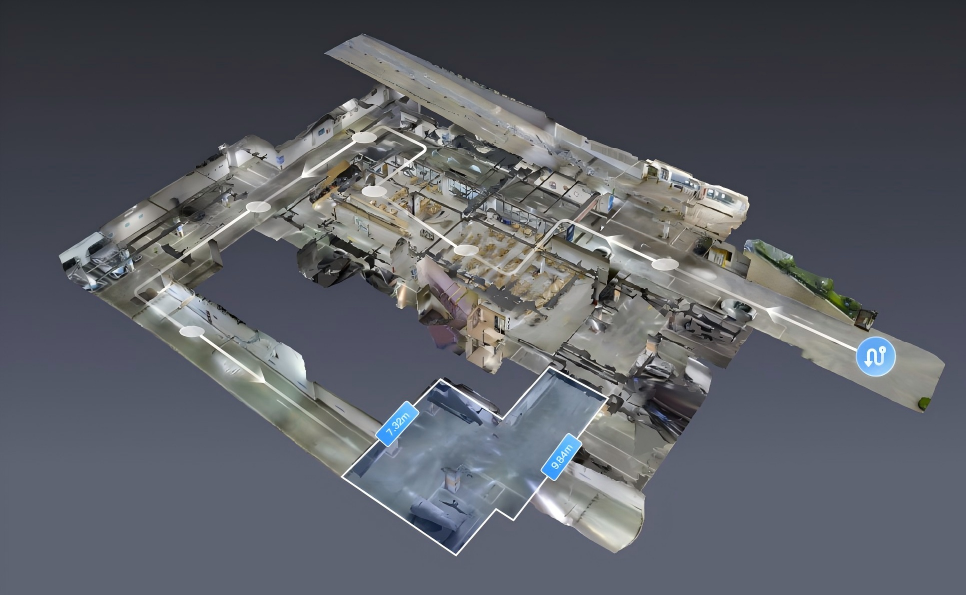
精细化建模
针对重点建筑,采用众趣科技三维重建技术:通过 SFM 运动恢复结构算法处理 200+ 张影像生成密集点云,经泊松曲面重建生成带真实纹理的高精度模型,可识别 2mm 以上结构细节(如门窗合页、管线阀门)。某金融园区案例中,20 栋重点建筑的精细化建模耗时 1 周,模型纹理贴合度超过 98%,支持 VR 全景漫游与隐蔽工程可视化巡检。
动态建模渲染
基于 WebGL 2.0 图形渲染接口,采用几何实例化+KTX2 纹理压缩技术实现模型轻量化,单建筑模型数据量从 1GB 压缩至 80MB 以内。结合 Three.js 框架开发数据驱动交互组件,通过 WebSocket 实时接收 IoT 数据,实现设备状态动态可视化(如故障设备红色高亮、异常状态闪烁警示),交互延迟控制在 200ms 以内。
三、关键技术突破与应用价值
1、时空大数据管理
基于 PostgreSQL+GIS 时空数据库,采用时空立方体(TimeCube)模型 存储多时态数据,通过 GIST 空间索引 + BRIN 时间索引组合,实现海量时空数据的高效查询。某物流园区 3 年累计的 200GB 车辆轨迹数据,查询响应时间从传统数据库的分钟级提升至秒级,效率提升 50 倍。
2、语义增强分析
构建设备-传感器-应急预案知识图谱,通过 RDF 三元组关联实体关系,形成包含“设备状态-空间位置-处置规则”的推理网络。当消防栓压力传感器检测到异常(<0.1MPa),系统自动触发 SPARQL 查询匹配应急预案,通过 Drools 规则引擎生成处置工单并推送至最近安保人员,应急响应时间从 5 分钟缩短至 30 秒。
3、实时虚实交互
基于 WebRTC 实时通信技术实现浏览器端 60FPS 高帧率渲染,支持 2000 + 用户并发访问,单用户带宽占用控制在 2Mbps 以内。某智慧园区平台采用分布式渲染架构(前端 WebGL 渲染+后端 GPU 集群),交互延迟控制在 50ms 以内,支持多用户在线协作标注巡检路线,操作冲突解决效率达 99%。
典型应用场景价值
● 规划决策:某科技园区通过数字孪生模拟 3 种扩建方案的日照时长(精度 ±15 分钟)、通风效率(风速误差 ±0.5m/s),辅助选择最优方案,节省 2000 万元规划调整成本。
● 运维管理:某化工园区通过 LSTM 网络预测设备故障概率,将事故预警时间提前 72 小时,故障漏报率降低 80%。
● 能耗优化:通过时空热力分析定位高耗能区域,联动智能设备降低 15% 能耗成本,年节约电费 300 万元。
四、众趣科技空间计算技术赋能实践
作为实景三维重建领域技术领先企业,众趣科技在空间数据底座构建中提供关键技术支撑:
高精度空间三维数据采集
自研 SPACCOM X3 Pro 3D 激光扫描仪集成 16 线激光雷达与 2400 万像素相机,单次扫描覆盖半径 100m,点云密度达 1000 点/㎡。通过自动化多站配准算法优化,整体拼接精度极高,为 BIM 建模提供毫米级原始数据。
动态数据更新
在装修管理场景中,通过每月周期性扫描构建施工进度模型,利用点云差分算法检测管线安装偏差。设计师通过众趣云平台在线标注隐蔽工程,数据经存证后自动同步至验收环节,项目沟通效率提升 3 倍,返工率降低 60%。
五、未来发展趋势
1、AI 技术深度融合
生成式 AI 数据补全
基于 Stable Diffusion 模型,根据周边建筑特征智能生成未建模区域的虚拟模型,缺失数据补全准确率预计提升 40%,解决复杂场景数据采集难题。例如,通过生成式 AI 可自动补全因遮挡或数据缺失导致的模型漏洞,结合 PointNet++ 点云分类网络实现自动化检测与修复。
强化学习智能决策
开发空间资源调度引擎,通过深度强化学习算法动态优化设备运行策略,预计降低 20% 资源浪费,实现园区管理从被动响应到主动优化的转变。
2、多模态交互升级
AR 智能运维
结合 HoloLens 2 混合现实眼镜,维修人员可通过手势操作查看设备三维模型,实时叠加运行参数与操作指南,复杂设备维修时间缩短 40%,提升现场作业效率。例如,西门子的 COMOS Mobile Worker 平台通过 AR 技术实现设备参数实时显示与远程协作,已在化工园区中显著降低维护成本。
自然语言交互
基于 T5 模型构建园区专属对话系统,支持复杂语音查询(如“生成本周高耗能区域巡检路线”),系统 3 秒内生成三维路径图,降低 80% 操作门槛,推动非专业用户高效使用。
3、开放生态构建
搭建空间数据开放平台,提供 RESTful API 与 WebSocket 实时接口,支持第三方开发者调用地图服务、分析工具。通过开发者激励计划吸引生态伙伴,某园区试点平台已接入 20+ 第三方应用,覆盖 80% 管理场景,创新应用孵化周期缩短 50%,构建 "底座平台 + 垂直应用" 的数字孪生生态体系。
结语
实景3D空间数据底座作为智慧园区数字孪生的核心基础设施,其构建过程是多技术融合的系统工程。从毫米级精度的数据采集到秒级响应的智能决策,每一项技术突破都在重塑园区管理范式。随着 5G、AI、数字孪生技术的深度融合,未来智慧园区将实现“全要素数字化映射、全状态实时化监测、全流程智能化决策”,为城市级数字化治理提供可复制的落地范式。而这一切技术变革的起点,正是这片承载着物理世界数字镜像的空间数据底座——它不仅是技术架构的基石,更是开启智慧园区未来的数字钥匙。

400-779-7900

 智慧园区
智慧园区 展会展厅
展会展厅 工程测绘
工程测绘 公共安全
公共安全 文博旅游
文博旅游 电商零售
电商零售 房产营销
房产营销 720°全景
720°全景 电力能源
电力能源