三维重建(3D Reconstruction)是计算机视觉和空间计算技术中的一项核心技术,旨在从二维信息中恢复出三维模型或场景。这项技术通过处理来自不同来源的数据(如图像、视频或传感器数据),构建出能够准确反映真实物体或环境的三维表示。三维重建技术是虚拟现实(VR),实景三维,元宇宙,游戏等领域构建虚拟数字空间的基础技术,能够实现对物理空间最完整、最深度的信息采集。
三维重建包含两个重要阶段:数据采集和数据制作。
空间数据采集阶段
深度信息采集:
通过专业设备(如激光雷达传感器、结构光传感器等)或算法(如单目图像 AI 深度估算模型)获取场景中物体的深度信息。
激光雷达传感器向物体发射一束光,并通过接收装置测量光线反射或散射回来的时间差,从而计算出物体离采集设备的距离,得到物体的深度信息。如果再配上一个角度测量装置,测量光线发射的角度,结合已知的距离信息,就能直接得到该物体在三维物理空间中的坐标。当我们利用传感器同时向场景发射无数道光,就能得到场景中各点的空间信息,也就是这些点离传感器有多远、在哪个角度等,并据此绘制出精准的深度图和点云。激光雷达这种采集方式在空间数据的精准性、实时性、便捷性、抗干扰性等方面具备显著优势。众趣旗下的自研 SPACCOM X3 系列 3D 激光扫描仪,每秒采集 20 万个点云数据,扫描精度达 10mm,最远测距 70m。在采集过程中 SPACCOM X3 显示出卓越的环境适应性,并能够精确捕捉空间内的每一处细节,让大空间和超大空间三维重建变得轻松与高效,为专业人士提供无与伦比的便利体验。
单目图像深度估计也是一种获取场景中物体深度的 AI 方法,它仅依赖于 RGB 相机采集得到的彩色图像便能快速估算物体深度。因为人类通过两个眼睛的视差来实现对距离的估算,但事实上我们用单个眼睛也可以大致估算出距离,这是因为脑已经记住了一些规律,比如已知大小的物体在图像中越小则距离越远、近处的物体会挡住远处的物体等。利用这一原理,众趣科技通过积累的数百万专业设备扫描的三维数据集,以彩色图为输入、深度信息为标注(答案)训练出单目图像深度估算 AI 模型,实现无需深度传感器、仅采集空间图像即可实现三维重建。深度估算模型的诞生,推动了众趣轻量级 VR 采集产品的诞生,让 VR 拍摄进入大众的日常生活成为可能。
图像信息采集:
使用 RGB 相机采集高色彩还原度的图像信息。图像可用于点云上色、为三维模型提供丰富的纹理细节,也可拼接成 360 度全景图像用于 VR/AR 的应用。众趣旗下的自研 SPACCOM X3 系列 3D 激光扫描仪,集成了高清相机,通过自研的无缝拼接算法可生成原生 1.34 亿像素的 16k 全景图像,同时使用自研 HDR 算法,可最大程度保留拍摄场景的高光与阴影细节,使画面更接近人眼的真实视觉体验。
点位拼接:
定点式扫描需要在固定点位采集深度和图像信息。合理规划点位布局和扫描路线能有效覆盖作业场景,提升作业效率。点位拼接针对稀疏离散的点位建立位姿关系。利用点位采集到的彩色图像和深度信息,通过提取特征寻找相似的匹配点位,并计算相对位置和姿态,最终实现多个点位之间的精确拼接。此外结合 IMU(惯性测量单元,是一种集成了多种惯性传感器的装置,用于测量和跟踪物体的加速度和角速度)等三方传感器数据能提高拼接的鲁棒性,克服特殊场景(弱纹理、长走廊等)带来的退化问题。

数据制作阶段
生成点云:
点云是空间中代表 3D 形状或对象的数据点集合,数据集中的每个点代表一组 X、Y、Z 几何坐标。在这一步中,制作流程会转化采集的深度信息为点云对象。
点云处理:
对点云数据进行去噪、异常值过滤等优化处理,提高后续三维重建的准确性和效率。
点云融合:
将多站的点云数据进行融合处理。包括多站点位间的位姿优化、多站点云的融合处理、整体点云的分块管理等。
网格重建:
由离散的点云生成连续表面。将点云数据连接成网格(网格单元一般为三角形或者四边形),形成多面体形状的外壳。
网格处理:
对网格数据进行优化和调整,去除尖锐边缘和不平整表面,使模型更加平滑自然。
纹理映射:
将采集的高清图像精确映射至模型网格表面,使三维模型更加真实。
3D 模型:
网格和纹理全部组合在一起,就得到了一个完整的三维模型,它支持在 3D 引擎中进行渲染和交互操作,譬如旋转、放大、缩小等。
格式转化:
生成的 3D 模型文件可转化为行业通用的标准格式,方便与专业 3D 设计软件对接。
成熟大规模落地三维重建介绍
(众趣空间重建)
在数据采集阶段,同时采集深度信息与图像信息,为后续数据制作提供了多模态数据基础。
基于多模态数据,提取出丰富的语义信息。语义信息是指对三维模型中各元素(如物体、场景等)的识别和标注。在三维重建过程中引入语义信息,有助于提高模型的准确性和实用性。
点云处理环节,结合多模态数据有效去除杂点,并进行智能空洞填补。
高效的多站点位姿优化技术。实现多站点数据的精准对齐,配准误差<5mm。
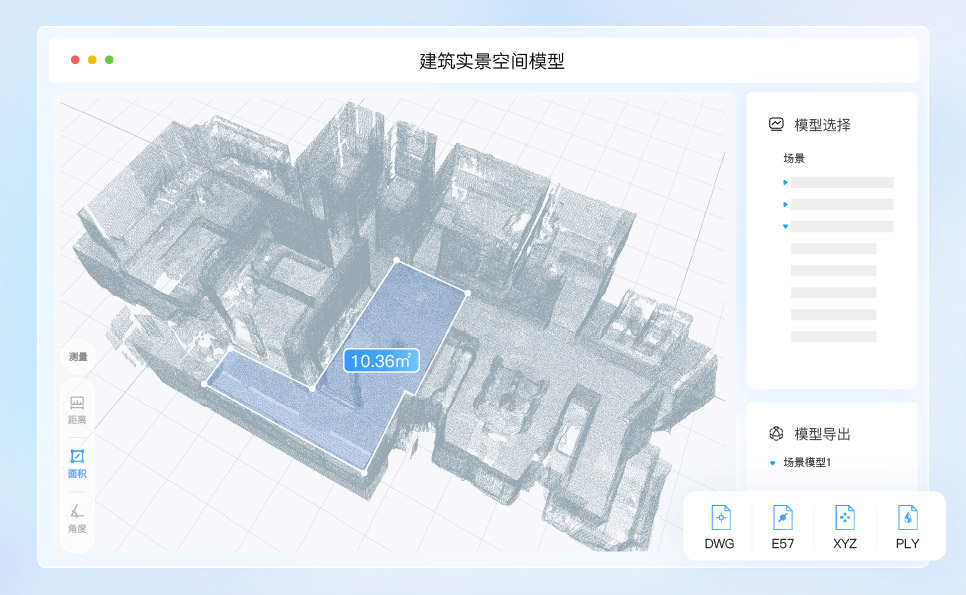
格式转换支持导出 LAS、PLY、E57 等标准点云格式。与 Revit、CAD、3DMax 等专业软件无缝对接。
独有的 AI 空间计算技术。以丰富的语义信息为基座,结合多模态数据可自动识别空间结构的关键点、线、面信息。针对房产领域,该技术可自动生成户型图、实勘图片和短视频,构建 3DVR 房源数据库,提升房源实勘质量。在三维重建过程中,该技术可以挖掘出丰富的潜藏数据,如空间结构信息、文字信息、物体信息等。这些数据可以进一步应用于数字空间的多样化场景,如营销推广、内部管理、人员引导、模拟培训等。
应用领域
三维重建技术广泛应用于城市规划、影视制作、游戏开发、考古研究、文物保护、医疗影像、虚拟现实(VR)、增强现实(AR)等诸多领域。随着技术的不断发展,其应用的广度和深度将不断拓展。
城市规划:
用于城市三维建模、交通规划等,提升城市规划的科学性和精准度。
影视制作:
为特效制作提供逼真的三维场景和角色模型,增强影视作品的视觉效果。
游戏开发:
构建丰富的游戏场景和角色模型,提升游戏的沉浸感和互动性。
考古研究:
对古代遗址进行三维重建,为考古研究提供直观、准确的数据支持。
文物保护:
对珍贵文物进行数字化保护,实现文物的永久保存和虚拟展示。
医疗影像:
在医学影像领域,用于构建人体器官的三维模型,辅助医生进行诊断和治疗规划。
总结
众趣科技通过持续迭代其三维重建技术体系,在精度、效率和易用性方面建立行业标杆,为数字孪生应用提供坚实的技术基础。2024 年推出的 SPACCOM X3 Pro 系列设备进一步提升了超大空间场景的数字化能力,推动多行业的三维数字化升级。众趣科技在三维重建领域具有鲜明的特色和优势:
技术领先:
网格和纹理全部组合在一起,就得到了一个完整的三维模型,它支持在 3D 引擎中进行渲染和交互操作,譬如随意旋转、放大、缩小等。
效率突破:
将传统方法需要数天甚至数周完成的三维建模任务缩短至几十分钟内完成,大大提升了工作效率。
精度保障:
具有工业级点云精度和超高纹理分辨率,支持 16K 超高清呈现,确保模型的真实性和细节表现。
全场景覆盖:
从智慧警务、房产服务到工程建筑等多个领域,众趣科技的技术均展现出广泛的应用潜力和价值。
数据安全:
支持国产化部署,满足公共安全等领域的数据安全需求,为用户提供更加可靠和安心的服务。

400-779-7900

 智慧园区
智慧园区 展会展厅
展会展厅 工程测绘
工程测绘 公共安全
公共安全 文博旅游
文博旅游 电商零售
电商零售 房产营销
房产营销 720°全景
720°全景 电力能源
电力能源